The IPPT PAN has finished research and development activities for United Robots, an American company, as part of a larger project titled “Opracowanie prototypu autonomicznej platformy poruszającej się w środowisku produkcyjnym” [designing a prototype of an autonomous platform for the production environment]. Every mobile device which can move autonomously, including unmanned cleaning robots, need to have the ability to answer basic questions such as: Where am I? Where is my target located? What do I have to do to get there?
Such issues are the objects of highly specialized branches of robotics which create mappings of the robot’s surroundings, manage the robot’s location on such maps, and plan the navigation commands which lead to the planned targets. Our project aims at the fastest possible cleaning activity of large warehouse spaces by a group of cleaning robots. Not only does each robot take care of itself, its location and a cleaning plan, but the whole group of robots are coordinated in such a way that one robot’s work does not interfere with another’s and that the cleaning period takes as little time as possible. Moreover, if one robot has a failure, others take over its dedicated cleaning zone so that every planned task is successfully completed.
Our task was to design mapping and navigation systems for cleaning robots. We used appropriate devices with dedicated software for creating maps based on laser rangefinders – the so-called LIDARs. Then, with the use of sensors situated on the cleaning platforms, the robots were ready to localize – that is – to find their position in the previously created maps. We designed algorithms which plan movement routes for the given group so that each point of the warehouse zone was visited and appropriately cleaned. The effectiveness of the implemented algorithms was documented with numerous simulations and experiments on real robots.
A crucial aspect in such works is to create a safe environment. Warehouses are places in which there are people who either walk or use vehicles, such as, e.g. forklifts. Robots who carry out works among people have to be equipped with reliable mechanisms which, at contact with a person, will safely stop the robots, without causing any harm. The cleaning platforms are equipped with a range of acoustic sensors, LIDARs, RGBD cameras, which – along with the software – enable a safe robot-person cooperation and have to be possess appropriate certifications to be able to work around people.
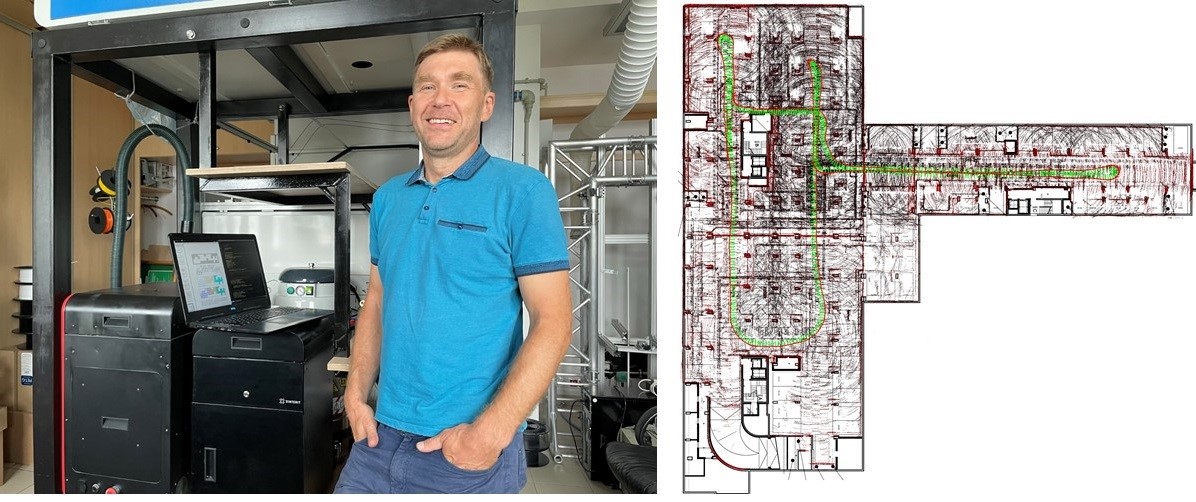
Above: dr. Jacek Szklarski at the laboratory of the Department of Intelligent Technologies, IPPT PAN, and a picture of the process of an underground garage mapping. The dots located at the arches represent point clouds – laser rangefinders measurements.
Below: dr hab. inż. Janusz Będkowski wearing a 3D mapping backpack, and a picture of a UR Cleaner, a cleaning robot