IPPT PAN zakończyło realizację prac badawczo-rozwojowych dla spółki United Robots w ramach realizacji projektu „Opracowanie prototypu autonomicznej platformy poruszającej się w środowisku produkcyjnym”. Każde urządzenie mobilne, które porusza się w sposób autonomiczny – w tym roboty sprzątające – musi posiadać zdolność do odpowiedzenia sobie na podstawowe pytania typu: Gdzie jestem? Gdzie jest mój cel? Co mam zrobić by tam się dostać?
Tymi zagadnieniami zajmują się wyspecjalizowane gałęzie robotyki, w ramach których tworzone są mapy otoczenia robota, określana jest pozycja robota na takiej mapie oraz planowane są komendy sterujące, które zapewnią realizację założonego celu. W omawianym projekcie, celem jest jak najszybsze wyczyszczenie dużych powierzchni hal magazynowych przez grupę robotów sprzątających. W tym przypadku, każdy robot nie tylko dba o siebie, swoją pozycję i swój plan – działania grupy muszą być skoordynowane, tak żeby roboty nie wchodziły sobie w drogę a cały czas niezbędny do wyczyszczenia zadanego obszaru był zminimalizowany. Ponadto, jeśli jeden z robotów uległby awarii, pozostałe powinny przejąć obszary przypisane do niego, tak żeby zadanie zostało zrealizowane prawidłowo.
Zadaniem naszych pracowników było opracowanie systemów mapowania i nawigacji dla robotów sprzątających. Wykorzystano do tego dedykowane urządzenia z oprogramowaniem do tworzenia map na podstawie dalmierzy laserowych – LIDARów. Następnie, za pomocą czujników umieszczonych na platformach sprzątających, umożliwiano im lokalizację, czyli odnalezienie swojej pozycji na skonstruowanych wcześniej mapach. Opracowano algorytmy, które planują ścieżki ruchu dla zadanej grupy, tak żeby każdy punkt zadanego obszaru hali został odwiedzony i odpowiednio wyczyszczony. Skuteczność zaimplementowanych algorytmów została udokumentowana licznymi symulacjami i eksperymentami na rzeczywistych robotach.
Niezmiernie ważnym aspektem w tego rodzaju pracach jest zapewnienie bezpieczeństwa. Hale magazynowe to środowisko, gdzie poruszą się ludzie, pieszo lub na różnego rodzaju pojazdach, np. wózkach widłowych. Roboty poruszające się wśród ludzi muszą być wyposażone w niezawodne mechanizmy, które w przypadku kontaktu z człowiekiem, zatrzymają się tak aby nikomu nie wyrządzić krzywdy. Omawiane platformy sprzątające wyposażone są w szereg czujników akustycznych, LIDAów, kamer RGBD, które – wraz z oprogramowaniem – umożliwiają bezpieczną współpracę z ludźmi i które to zdolności potwierdzone są odpowiednimi certyfikatami.
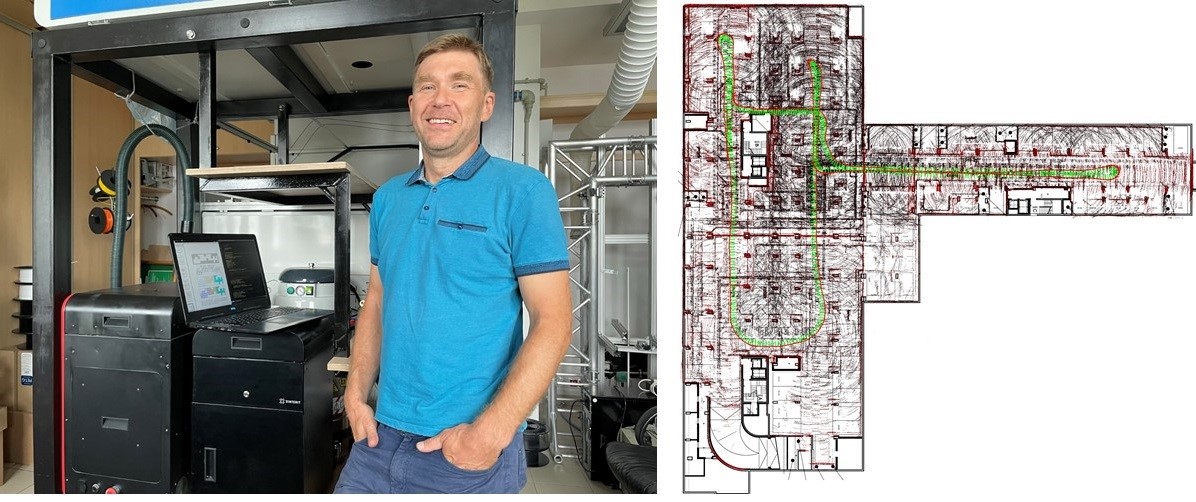
Powyżej: dr Jacek Szklarski w laboratorium Zakładu Technologii Inteligentnych IPPT PAN oraz ilustracja procesu mapowania garażu podziemnego. Kropki rozmieszczone na łukach reprezentują chmury punktów – pomiary z dalmierzy laserowych.
Poniżej: dr hab. inż. Janusz Będkowski z plecakiem do mapowania 3D środowiska oraz zdjęcie robota sprzątającego UR Cleaner.